
Una de las fases más importantes es la disposición de los tres motores con respecto al CG y al eje longitudinal del fuselaje. Un buen diseño de esta geometría será fundamental para la estabilidad en las transiciones y en el propio vuelo en modo plane.
Y para conseguir esta geometría vamos a partir de una primera regla fundamental:
- En un avión VTOL el centro de gravedad CG siempre debemos posicionarlo en el punto que requiera el modelo cuando vuela en modo plane.
Otra segunda regla fundamental cuando hablamos de un tricóptero clásico es:
- La distancia de la linea que une los dos motores delanteros al CG ( en mi caso esta distancia es de 137 mm, estando el CG está a 58 mm del borde de ataque) es 1/3 de la distancia entre ésta y el motor trasero, Y la distancia del motor trasero al CG será 2/3 de esta misma distancia. Tratándose siempre de tres motores iguales.
- Aunque hablando con propiedad deberíamos decir que (la suma del empuje de los dos motores frontales) x 1/3 = (suma del empuje del trasero) x 2/3
La primera regla es una premisa invariable que respetaremos escrupulosamente. Pero la segunda regla debemos de modificarla cuando hablamos de un plane VTOL Y3 ya que el balanceo tilt-rotor de los motores frontales nos modificarán la posición del CG. Es decir, el CG en modo copter se retrasará (en mi caso 15mm) debido a este movimiento de los motores cuando éstos balancean de la posición horizontal en plane a la posición vertical en copter.
¿Y de que manera la modificaremos? Pues lo haremos variando el empuje del motor trasero con el objetivo de que consiga equilibrar este nuevo CG en modo copter (que no se corresponderá con el CG ideal del tricóptero pues se ha retrasado) manteniendo su rendimiento sin sobrecargarlo, para lo cual tenemos 3 alternativas:
- sustituir la hélice por otra de mayor diámetro
- sustituyendo el motor por uno de mas potencia
ó una mezcla de ambas
- retrasando el motor trasero para aumentar el momento de cola.
Yo he optado por la última pues ya disponía de 3 motores iguales y si aumentaba el diámetro de pala ésta se solaparía con la superficie del estabilizador. Pero en función del aeromodelo elegido habra que decidirse por una u otra alternativa. He aumentado por tanto la distancia del CG al eje del motor trasero (los 2/3 que comentaba anteriormente) en un 36%.
Otro punto importante a la hora de diseñar la disposición de los motores es ver cuanta superficie abarcada por las hélices se solapa con la superficie del extrados del ala o del estabilizador de cola. Podrán solaparse sobre el extrados un poco pero no sobre la superficie del estabilizador pues esto desequilibrará el aeromodelo por la distancia de éste al CG.
Os comentaba al principio que se trata de un VTOL Y3 en el que el movimiento yaw no se realiza como en un tricopter convencional sino que lo hace balanceando unos pocos grados (entre 10º - 25º en función del aeromodelo) cada motor frontal en sentido inverso (a esto se le llama yaw vectorial). Con esta solución evitamos el mecanismo yaw clásico y por tanto sobrepeso >>> Es importante considerar a la hora de diseñar el mecanismo tilt-rotor que la pala en su movimiento hacia atrás de unos 20º no golpee el extrados del ala.
Y hablando de peso también es importante tener en cuenta escatimar todo el peso posible en las soluciones a adoptar pues ya intrínsicamente un VTOL por sus mecanismos extra de balanceo tiende a ganar peso final.
Y para finalizar con las consideraciones iniciales a la hora del diseño es aconsejable disminuir unos grados los 120º clásicos que separan los motores frontales de un tricopter cuidando de que en su posición horizontal las palas no golpeen el fuselaje. Esto lo hacemos con el objetivo de acercar lo motores frontales en modo plane al eje longitudinal del fuselaje pues es sabido que un avión bimotor convencional es más estable cuanto más cercan estén los motores frontales uno del otro. En mi “Pequeño Saltamontes” he dejado ese ángulo en 108º, quedando separados los rotores frontales una distancia de 380 mm entre ejes.
Y para terminar con las premisas iniciales comentaros que el variador de este motor se ha de configurar con “freno motor” para evitar el giro libre de la pala en modo plane.
Bueno, pues una vez comentadas todas estas consideraciones iniciales a tener en cuenta en el diseño de la geometría ya pasamos a la fase de montaje. Lo primero fue diseñar las piezas en 3D para el sistema tilt-rotor.

Consta de dos piezas, una en la que encaja el servo decidido (un Emax ES3352 digital de 12gr y 2,4 kg/cm de torque), suficientes para levantar los motores y palas elegidos (Sunnsky X2212 K980 & 10"x5") y que a su vez se inserta en un tubo de carbono de 10x10x155 mm que va encajado en el ala, el cual sujetará todo el conjunto tilt-rotor. He añadido un rodamiento de M3 en el extremo contrario al engranaje del servo para evitar holguras...
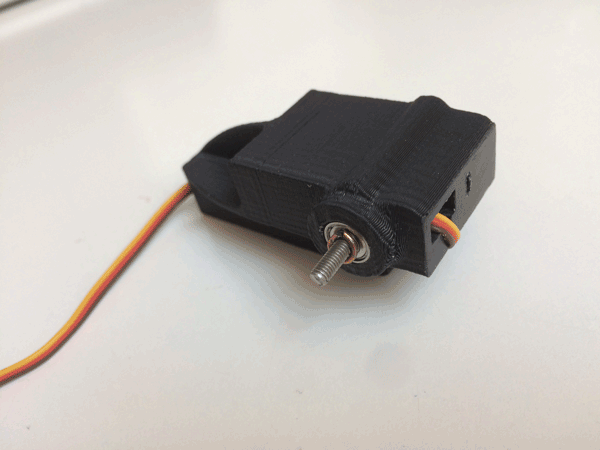
...y otra segunda pieza que soportará y balanceará el motor. A la cual le he incrustado otro rodamiento y la cruceta del servo.

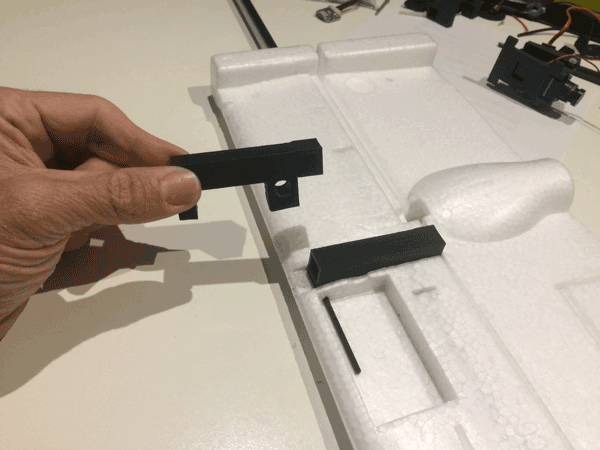
Para la fijación del tubo de carbono de 10x10x155 mm a cada semiala diseñe estas piezas que con un poco de cirugía en el poliestireno encajan perfectamente de tal manera que son atravesadas por el larguero de carbono de 8 mm que unen ámbas semialas y por un pequeño tubo de carbono de 4 mm.



Y pasamos al fuselaje. La pieza más importante sin duda es la que soporta el eje del motor trasero pues ha de ser una pieza robusta. Va encajada como se observa en la foto sustituyendo a la cuaderna que sujeta el motor del diseño original.


Para la sujeción del sensor de velocidad elegí esta pieza de Thingeverse. Teniendo en cuenta su posición para que no le afecte el aire de las palas o los remolinos sobre el fuselaje. El GPS está colocado tras el pod delantero a una distancia prudente del TxAV.


Para la sujeción del motor trasero & variador (RCtimer 30A opto) , un tubo de carbono de 10x10x300 mm y esta otra pieza.

Y un par de piezas 3D que junto a un tubo de carbono de 6 mm le dan una rigidez estructural al conjunto extraordinaria lo que evita cimbreos indeseables del empenaje de cola. Esta solución es algo vital.

En el pod delantero del fuselaje va dispuesto un pan-tilt ligero para dos cámaras (1000TVL y Mobius), el TxAV 5.8 Ghz y un conector XT60 que conecta el cable negativo de la batería a modo de “llave de arranque”.



La batería es un pack de 18650 4S2P de 6200 mA al que le he dado una forma específica para conseguir equilibrar el CG.

Un aspecto a considerar en los diseños VTOL es que la posición adelantada que requieren los motores frontales nos obligará a colocar las baterías mas cerca del CG. Decidí colocar dos servos (Emax ES3302, uno en cada deriva) primero para poder disponer de timón de direccion y segundo para compensar este peso adelantado de los dos motores delanteros.

Y por último el corazón del “Pequeño Saltamontes”. Hago un repaso rápido de sus componentes pues no es objeto de este artículo detallar el conexionado básico de todos los componentes sino centrarse en la parte concerniente a VTOL.

Opté por hacer una cama abatible dividida en dos partes y unidas con dos bisagras para poder deslizarla sobre unas guías y sacar todo el conjunto por la parte delantera. En esta cama van dispuestos ordenadamente en la parte superior el microRx Dragonlink, la controladora de vuelo Pixhawk, un filtro LC, un mimimOSD, una regleta I2C, una power module & PCB distribuidora & BEC 5v, un microBEC 5v/1,5A y por la parte inferior el buzzer alejado de la pixhawk, dos BEC de 5v y una plaquita distribuidora para simplificar las conexiones. En los cables hacia los variadores he utilizado conectores XT30, más ligeros que los XT60 y suficientes para soportar los picos de un máximo consumo de 21 A.
El minimOSD está alimentado a 12v en vez de a 5v para evitar ruidos en el video proveniente de los servos, ya que al final tenemos a bordo un total de 9 servos.
Os dejo aquí un link para descargar los ficheros STL de cada una de las piezas impresas en 3D
Y unos videos del día del primer test. El MSH VTOL Y3 realizo las transiciones a la perfección manteniendo horizonte y estabilidad.
En la segunda parte abordaré todo lo relacionado con la parametrización y configuración necesaria. Añadiré un link para poder descargar un fichero PDF con el valor de cada uno de los parámetros y un videotutorial explicando claramente cada uno de ellos.
Espero que os haya servido de ayuda.
>>> COMPARTIENDO AVANZAMOS <<<