
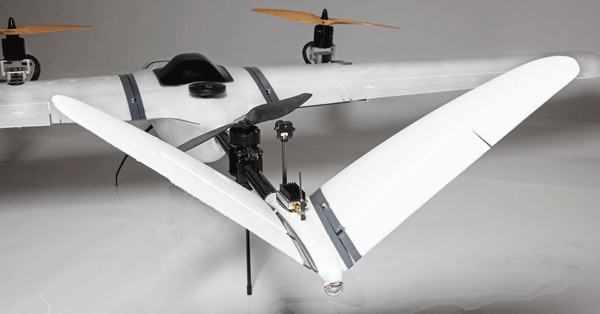
1- SISTEMA TILT-ROTOR
La opción de que los motores delanteros sean basculantes siempre supone un hándicap, pues ha de ser un sistema robusto y a la vez super eficiente; por esta razón elegí unos servos específicos para esta función: UAVS VDS320HV. Se trata de un servo de alto par, con un brazo y soporte específicos para VTOL, y cero holguras.
El resultado después de un año de vuelos ha sido espectacular. No han requerido mantenimiento alguno.


Cada servo va sujeto con dos abrazaderas a un tubo redondo de carbono de 12 mm que encaja en la pieza de PVC que viene de serie en cada sem-iala. Se realiza un taladro roscado en cada abrazadera para introducir un tornillo M2 con el objeto de evitar un desplazamiento ó giro de los motores sobre este tubo redondo, como se muestra en la foto.

El motor elegido para el sistema tilt-rotor fue el Sunnysky X3520 520KV, éste viene con un eje que en su parte trasera sobresale en exceso, utilizado para otro menester pero que en nuestro caso no necesitamos. Por tanto, lo primero es cortarlo a la medida adecuada para que no dificulte el movimiento tilt del servo.


Los servos son caros, yo los obtuve de segundamano a buen precio y además posiblemente a estas alturas ya ni se comercialicen, así que os propongo la mejor opción DIY entre todas para este sistema de mi buen amigo Raul Ortega: >>> VTOL conversion Kit
Y de paso echar un vistazo a todos sus diseños para el Nimbus 1800 VTOL, en función de vuestras necesidades y elección de sistemas os vendrán de lujo.
2- MODIFICACIONES EN SEMI-ALAS
Refuerzos previos del kit de origen
Decidí colocar bisagras de nylon en ambos alerones, atravesadas por palillos redondos de madera transversalmente para evitar que se soltaran en vuelo (lo hice también en las partes móviles del empenaje) pues no me daba ninguna confianza el sistema de serie.
También incrusté unas pletinas longitudinales de 5x1 mm de carbono en el interior de los alerones paar evitar el cimbreo de serie (ver fotos adjuntas).
Y por último, un refuerzo en el borde de salida de cada semiala en su parte mas cercana al fuselaje: tubito de carbono 2mm & pletina de carbono (ver fotos adjuntas).




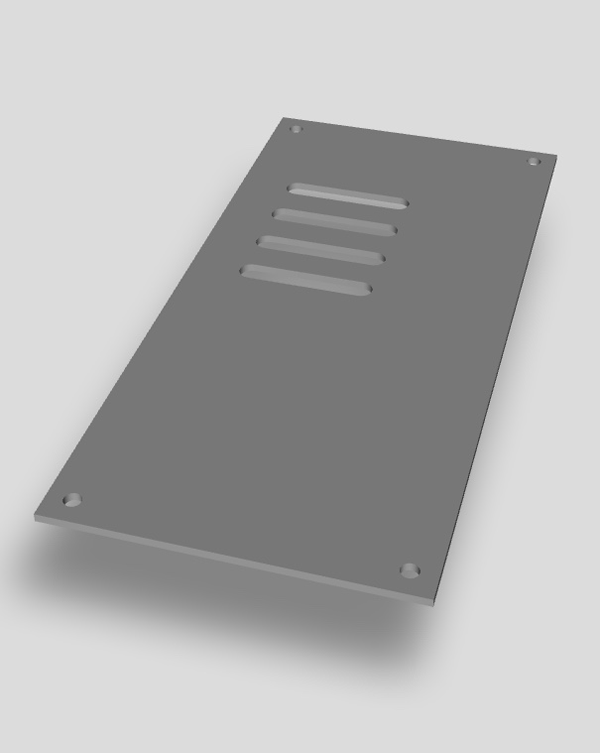
- 2.1 - Registros en semi-ialas para BEC & Luces de navegación
Decidí incorporar un BEC de 8A en cada semi-ala para alimentar independientemente el servo tilt, el alerón y las luces de navegación. Para ello encastré un registro & tapa en el intrados de cada semiala. Desde estos registros salen el cable de señal y alimentacion hasta los bordes marginales para las luces de navegación de posición y estroboscópicas.



- 2.2 - Anclajes de semi-alas al fuselaje
El sistema de sujeción de serie deja mucho que desear y requiere revisarlo y reforzarlo. Prestar atención a los tornillos de anclaje de cada gancho y reforzarlo convenientemente. Este consejo sirve también para los ganchos de anclaje del empenaje al fuselaje.
- 2.3 -Antena LRS
Utilizo Dragonlink como sistema LRS y para evitar interferencias con otros componentes electrónicos lo mejor es alejar la antena dipolo de éste lo más lejos posible. Y en este caso un semi-ala es el lugar adecuado.
Disponéis en el link de descarga de las piezas 3D necesarias para alojar la antena en el semi-ala izquierda. Realizamos un canal para el cable coaxial del dipolo introduciendo una varilla caliente longitudinalmente al ala; otra opción es cortar un canal en la superficie del intrados.
En el fuselaje solo es necesario realizar un túnel entre el espacio central de la electrónica que atraviese el perfil, dejando asomando el conector SMA desde el Tx Dragonlink.


Ambos dipolos son desmontables para facilitar el transporte. Una solución simple y eficaz utilizando varilla de soldar o similar de 1mm de sección y bananas de 2mm para su colocación rápida

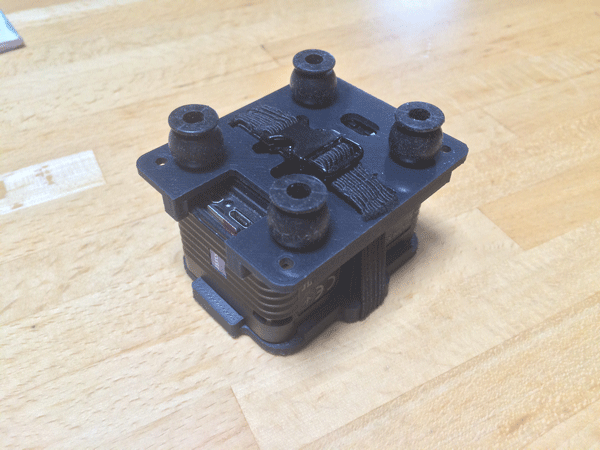
3- EL CORAZÓN DEL SISTEMA
Pasamos a la parte mas importante del VTOL, la que exige comprimir en el mínimo espacio posible toda la electrónica y cableado necesario. La idea de “comprimirlo” es por la premisa de poder tener espacio suficiente en la bodega para la batería ó/y para poder desplazar ésta longitudinalmente con el objeto de adecuar la posición del CG.
Decidí incorporar una segunda cámara en el empenaje y luces de posición estroboscópicas en alas y fuselaje, y esto hizo mas complicado lo de “comprimirlo”.
El “corazón del sistema” lo distribuí en 3 pisos. Para ello diseñé unas piezas en contrachapado aeronáutico distanciadas por separadores de aluminio.






4- MODIFICACIONES DEL FUSELAJE
Hubo que reforzar diferentes partes como por ejemplo la prolongación del borde de salida en ambos laterales del fuselaje. Para ello utilicé varilla de acero de 1mm como se aprecia en las fotos adjuntas.
Por otra parte, el pod de contrachapado que sujeta el tren de aterrizaje no ofrece un anclaje adecuado. Insertando dos láminas de contrachapado en cada lateral se evita que el conjunto se hunda en un aterrizaje VTOL.
También se ha colocado en cola luz de navegación de posición y estroboscópica.
- 4.1 - Transmisor AV & cámara trasera
He colocado el transmisor AV 1.2 Ghz en la parte trasera del fuselaje a la altura del empenaje. En una pieza 3D coloco éste y a la vez la segunda cámara situada en altura para superar el nivel de la hélice trasera.

- 4.2 - Sujeción del motor trasero
Esta parte no tiene ningún secreto más allá de poneros el link de las piezas necesarias. Lo complique un poco por tratar de ocultar el variador y que todo tuviera una mejor estética. Añadir que en las abrazaderas realicé un taladro roscado para atravesar justo la pared del tubo de carbono con el objetivo de que todo el conjunto no girara ni se desplazara sobre él.


5- MORRO DELANTERO
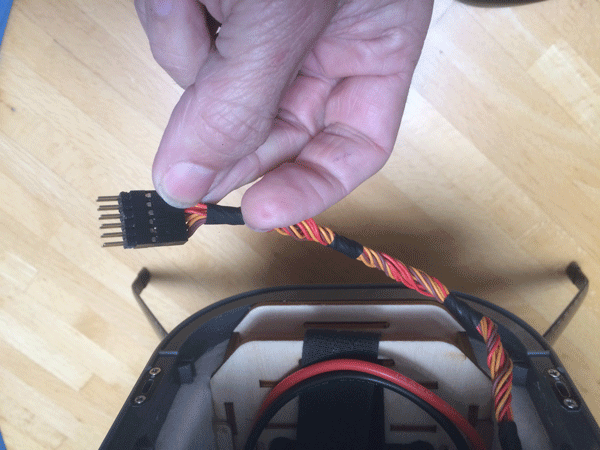
El morro delantero es otra de las piezas que dejan mucho que desear en el diseño de este kit. Lo primero que hay que hacer es sustituir el sistema de conexionado eléctrico con el fuselaje por otra opción. Yo decidí hacer una transmisión directa por cable menos estética pero más segura. Otra opción es impresión 3D (link a pieza de Raul)

Otra modificación fue asegurar el anclaje con una pieza 3D de Raul Ortega; la considero indispensable si no quieres tener un disgusto en vuelo > video
Para el cierre de la cabina prescindí de imanes y opté por bisagras de nylon y un tirador oculto > video
El sensor de velocidad tan solo se incrusta en una pieza de foam interna para en caso de colisión se introduzca libremente hacia el interior.
En la parte inferior del morro coloqué un pan-tilt (diseño de Markqv) con un cámara MiniMobius alimentada desde lipo y sin batería interna.
La última modificación ha sido incorporar una segunda cámara Sony RX0 para realizar trabajos de fotogrametría. Va alojada bajo el fuselaje detrás del tren de aterrizaje y es fácilmente extraible > video
El soporte es un diseño inicial de Raul para una cámara GitUp que he modificado para adecuarlo a las medidas de mi Sony RX0.



* Aquí podéis descargaros el backup de los parametros para Arduplane:
* En este otro tenéis una relación de los componentes utilizados en el montaje:
* Y por si fallara Thingiverse, os dejo aquí los STL necesarios para imprimir:

Posiblemente se me escape algún detalle, si así fuera no dudéis en pregúntame desde el formulario de la web.
Un abrazo a todos
>>>>> COMPARTIENDO AVANZAMOS <<<<<




































































