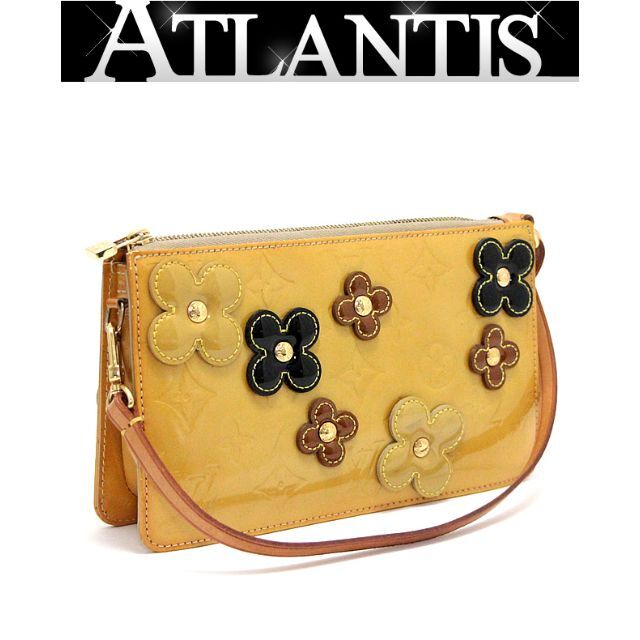
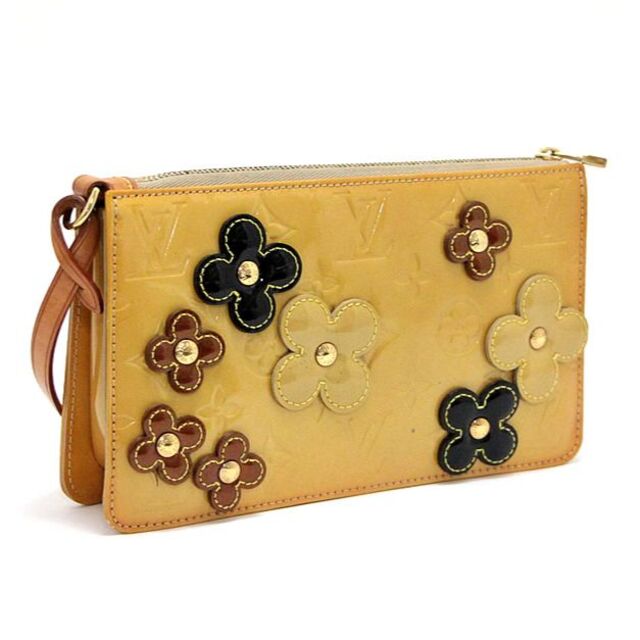
ルイヴィトン モノグラムヴェルニ レキシントン アクセサリーポーチ
(税込) 送料込み
商品の説明
ルイ ヴィトン レキシントン ポーチ ヴェルニ ベージュ LOUIS VUITTON
ルイ・ヴィトン(LOUIS VUITTON)
レディース・バッグその他
[ライン]ヴェルニ
[タイプ]レキシントン
[型番]M91010
[素材]パテントレザー
◎サイズ◎
W:20cm H:12cm D:4cm ハンドル:32cm
正規店購入品
ご質問等ございましたらお気軽にコメントください^^!!!商品の情報
| カテゴリー | レディース > バッグ > ポーチ/バニティ |
|---|---|
| ブランド | ルイヴィトン |
| 商品の状態 | 目立った傷や汚れなし |

楽天市場】【バッグ】LOUIS VUITTON ルイ ヴィトン モノグラムヴェルニ

ルイヴィトン レキシントン モノグラム ヴェルニ アクセサリーポーチ-

ルイヴィトンバッグルイヴィトンモノグラムヴェルニレキシントン

直販半額 ルイヴィトン レキシントン モノグラム ヴェルニ

ルイヴィトン モノグラムヴェルニ レキシントン アクセサリーポーチ-

✨️美品 ルイヴィトン モノグラム ヴェルニ レキシントン

楽天市場】【バッグ】LOUIS VUITTON ルイ ヴィトン モノグラムヴェルニ
ルイヴィトン フラワーレキシントン アクセサリーポーチ M92246 59709

ルイヴィトン ヴェルニ レキシントン アクセサリー ポーチ-

楽天市場】ルイヴィトン LOUIS VUITTON アクセサリーポーチ

ルイヴィトン モノグラムヴェルニ レキシントン アクセサリーポーチ

LOUIS VUITTON】ルイヴィトン『モノグラム ヴェルニ レキシントン

LOUIS VUITTON】ルイヴィトン『モノグラム ヴェルニ フラワー

LOUIS VUITTON ルイ・ヴィトン M91010 モノグラム ヴェルニ

LOUIS VUITTON ルイ・ヴィトン M91010 モノグラム ヴェルニ

ルイ・ヴィトン Louis Vuitton レキシントン ハンドバッグ アクセサリーポーチ モノグラムヴェルニ フランボワーズ(ピンク) M9131F レディース 【中古】 | バイセル 楽天市場店

特別オファー ルイ・ヴィトン Louis Vuitton レキシントン

ルイヴィトン モノグラムヴェルニ レキシントン アクセサリーポーチ
美品 ルイヴィトン モノグラム ヴェルニ レキシントン アクセサリー

ルイヴィトン M44 モノグラムヴェルニ レキシントン アクセサリーポーチ ク

ルイヴィトン モノグラムヴェルニ レキシントン アクセサリーポーチ-

LOUIS VUITTON ヴェルニ フラワーレキシントン アクセサリーポーチ-

ルイヴィトン モノグラムヴェルニ レキシントン アクセサリーポーチ

LOUIS VUITTON ルイ・ヴィトン M91010 モノグラム ヴェルニ レキシントン アクセサリー ポーチ イエロー系【中古】

LOUIS VUITTON - 美品 ルイヴィトン モノグラム ヴェルニ レキシントン
![Amazon | [ルイヴィトン] M92246 フラワー レキシントン モノグラム](https://m.media-amazon.com/images/I/5139FelrG L._AC_UY580_.jpg)
Amazon | [ルイヴィトン] M92246 フラワー レキシントン モノグラム

ルイヴィトン レキシントン モノグラム ヴェルニ アクセサリーポーチ

LOUIS VUITTON - ルイヴィトン ヴェルニ レキシントン アクセサリー

バイセル公式】ルイ・ヴィトン レキシントン ハンドバッグ 化粧 メイク

1円 LOUIS VUITTON ルイヴィトン M91011 モノグラムヴェルニ

LOUIS VUITTON】ルイヴィトン『モノグラム ヴェルニ レキシントン

LOUIS VUITTON ルイ・ヴィトン M91010 モノグラム ヴェルニ レキシントン アクセサリー ポーチ イエロー系【中古】

楽天市場】LOUIS VUITTON ルイヴィトン M91010 モノグラムヴェルニ
![Amazon | [ルイヴィトン] M91010 レキシントン モノグラムヴェルニ](https://m.media-amazon.com/images/I/61Y1mSrlehS._AC_UY580_.jpg)
Amazon | [ルイヴィトン] M91010 レキシントン モノグラムヴェルニ

ルイヴィトンバッグルイヴィトンモノグラムヴェルニレキシントン

LOUIS VUITTON ルイヴィトン モノグラム ヴェルニ レキシントン

ルイヴィトン モノグラムヴェルニ レキシントン アクセサリーポーチ
ルイヴィトン フラワーレキシントン アクセサリーポーチ M92246 59709

B46 ルイヴィトン モノグラム ヴェルニ レキシントン アクセサリー

高級✨ ルイヴィトン レキシントン アクセサリーポーチ モノグラム






商品の情報
メルカリ安心への取り組み
お金は事務局に支払われ、評価後に振り込まれます
出品者
スピード発送
この出品者は平均24時間以内に発送しています














